

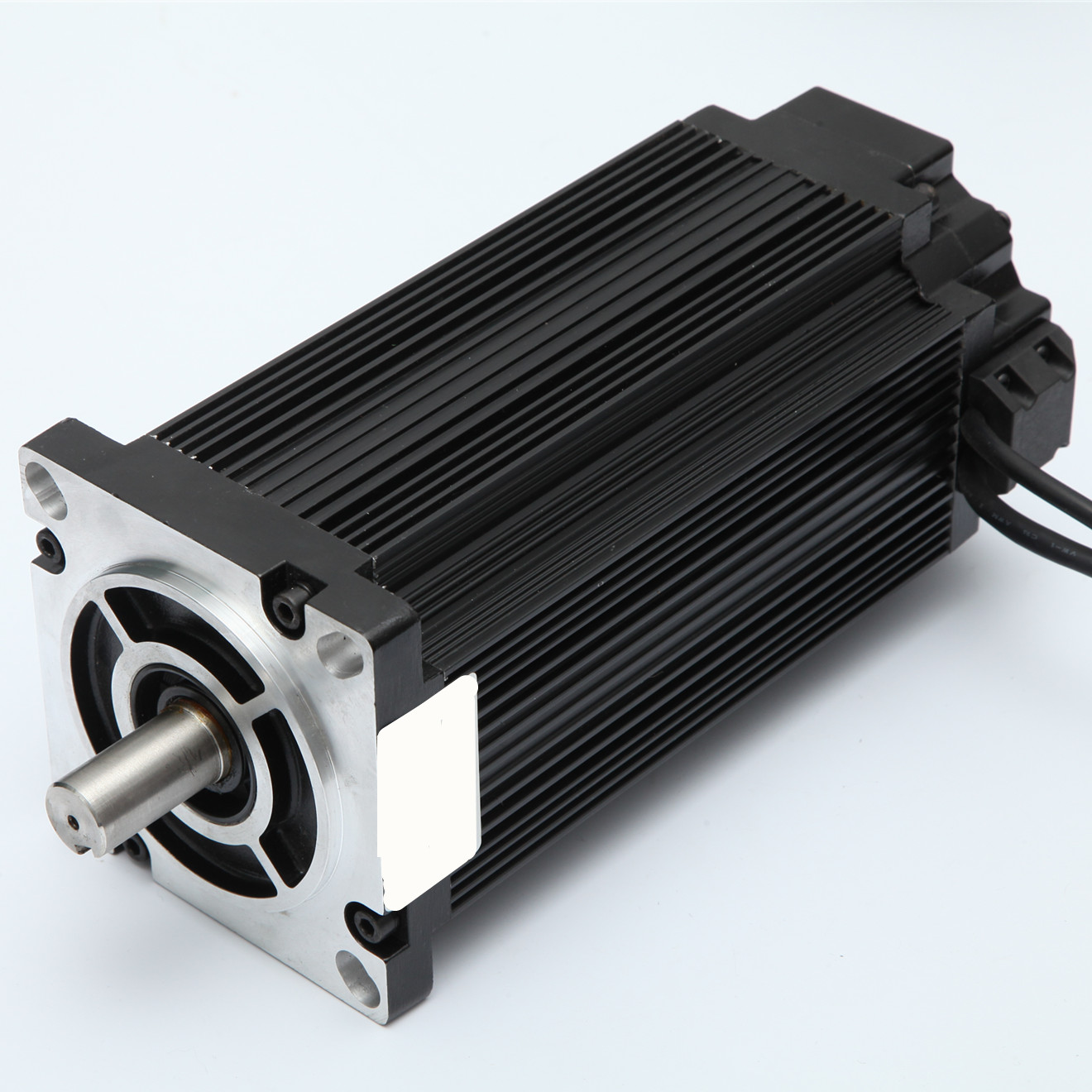
Héich Volt Digital Display 220V Nema42 zougemaach Schleifen 12Nm Stepper Motor
NEMA42 Easy Servo Serie (NEMA42 Closed Loop Serie)
Motor elektresch Parameteren:
| Modus | Schrëtt Wénkel | Aktuell (A) | Resistenz (Ω±10%) | Induktioun (mH±20%) | Haltmoment (Nm) | Motorlängt (mm) | Encoder Resolutioun (PPR) | Applicabel Chauffer |
| Spezifikatioune vun 110HCE12N-B39 | 1,2° | 4.2 | 1.2 | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE20N-B39 Fotoen | 1,2° | 4.2 | 1.88 | 18 | 20 | 221 | 1000 | 3HSS2260 |
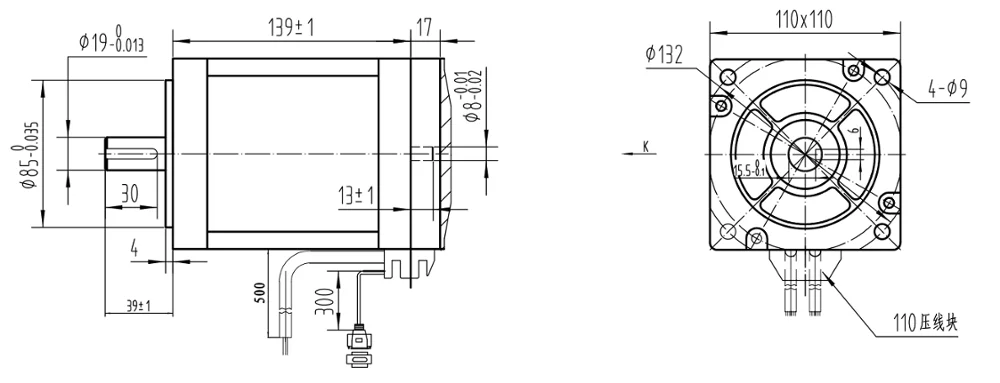
Motor Dimensiounen: mm
Dréimoment / Frequenz Curve
Treiber 3HSS2260
Eegeschaften
1, 32-Bit DSP a Vektor zougemaach-Loop Kontroll Technologie
2, Ouni Schrëtt ze verléieren, héich Genauegkeet an der Positioun
3, Verbessert de Motorausgangsmoment an d'Aarbechtsgeschwindegkeet
4, Variabel aktuell Kontrolltechnologie, behalen Motortemperaturerhéijung
5, Upasst un d'Varietéit vu mechanesche Belaaschtungsbedéngungen (inklusive Low-Steifheet Pulleys), nee
muss de Gewënn Parameter ajustéieren
6, glat an zouverlässeg Beweegung, niddereg Schwéngung, grouss Verbesserung vun beschleunegen an
deceleréieren
7, D'Fäegkeet vun Nullgeschwindegkeet statesch ouni Schwéngung
8, Adaptatioun un 3-Phase 86 (NEMA34) an 110 (NEMA 42) Hybrid Servo Motor
9, Maximal Schrëtt-Pulsfrequenz 200KHZ
10, Mikro Schrëtt 400-60000 Pulsatiounsperiod / Rev
11, Spannungsbereich AC150-240V
12, Iwwer Stroum, Iwwerspannung an Iwwer Positioun Schutz
13, Sechs digital Tube Display, einfach Parameteren ze setzen an de Motor ze iwwerwaachen
Staat
Microstep Auswiel:
| Code | Definitioun | Range | Default Wäert | Bemierkung |
| PA0 | Versioun Zuel | 501 | Verbueden ze änneren | |
| PA1 | Kontroll Modus Auswiel | 0~2 | 0 | |
| PA2 | Motor Typ Auswiel | 0~2 | 0 | |
| PA3 | Power On Display | 0~7 | 0 | |
| PA4 | Aktuelle Loop Kp | 0 ~ 1000 | 200 | Verbueden ze änneren |
| PA5 | Aktuell Loop Ki | 0 ~ 1000 | 300 | Verbueden ze änneren |
| PA6 | Positioun Loop Kp | 0 ~ 1000 | 300 | |
| PA7 | Mikro Schrëtt Astellung | 400-60000 | 4000 | |
| PA8 | Encoder Resolutioun (1000) | 4000 | Verbueden ze änneren | |
| PA9 | Encoder Resolutioun (1000) | 40-30000 | 1000 | |
| PA10 | Holding aktuell | 10-100 | 40 | |
| PA11 | Closed Loop Aktuell | 10-100 | 100 | |
| PA12 | Reservatioun | |||
| PA13 | Reservatioun | |||
| PA14 | Niveau aktivéieren | 0/1 | 0 | |
| PA15 | Alarm Niveau | 0/1 | 0 | |
| PA16 | Pulsmodus Auswiel | 0/1 | 0 | |
| PA17 | Pulse Edge | 0/1 | 0 | |
| PA18 | Motor Rotatioun Richtung | 0/1 | 0 | |
| PA19 | JOG Geschwindegkeet | 1 ~ 200 | 60 | |
| PA20 | PEND Modus Sektioun | 0/1 | 0 | |
| PA21 | PEND Niveau | 0/1 | 0 |
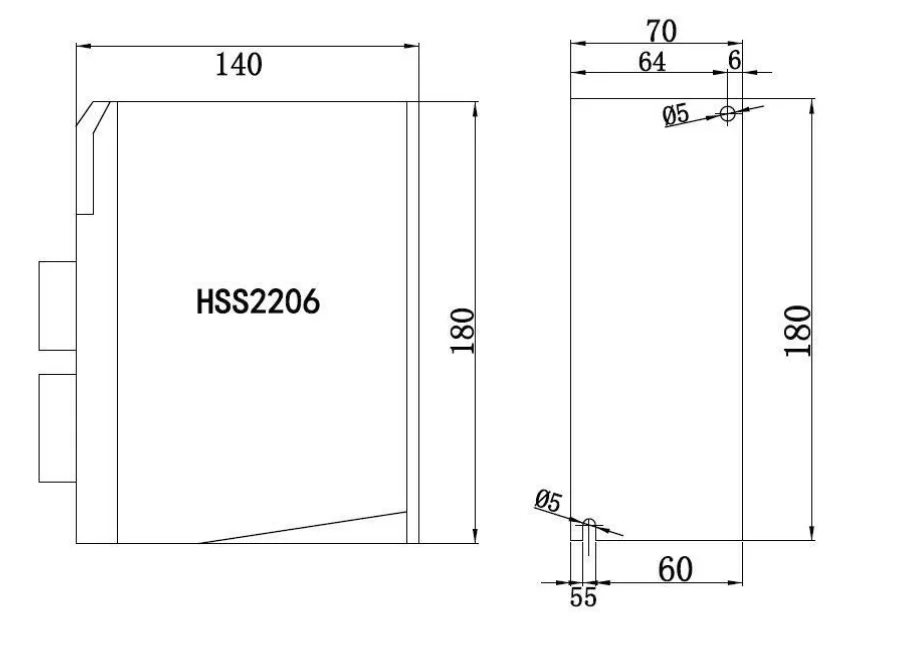
Driver Dimensioun (mm):
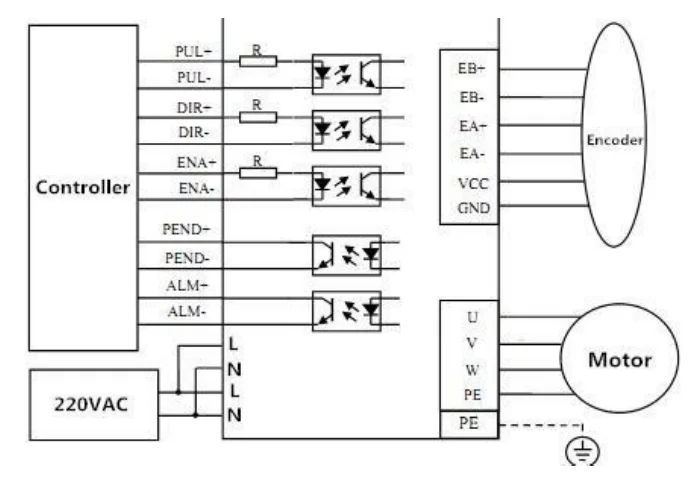
Wiring Diagram:



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
